
گروه صنعتی برقاب صنعت
الکتروموتور جریان متناوب
برای دست یابی به مشخصات فنی مطلوب الکتروموتور بر اساس اصول دقیق مهندسی نیاز به شناخت آن از جنبه های مختلف می باشد.این شناخت کمک شایانی به انتخاب صحیح و بهره برداری درست از الکتروموتور نموده و کار طراحی سیستم حفاظتی مناسب را تسهیل می نماید.در این بخش به طور مختصر اساس کار وحالات کار عادی وراه اندازی الکتروموتور ها ونیز واژه های متداول در طراحی وبهره برداری از آنها بررسی می شوند.
نحوه عمل الکتروموتور های القایی
[psfw slug=”%d9%85%d8%ad%d8%b5%d9%88%d9%84%d8%a7%d8%aa-%d8%a7%d9%84%da%a9%d8%aa%d8%b1%d9%88%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d9%88-%da%af%db%8c%d8%b1%d8%a8%da%a9%d8%b3″]
الکتروموتور دستگاهی است که انرژی الکتریکی را به مکانیکی تبدیل می نماید. الکتروموتور القایی متداول ترین نوع الکتروموتور در صنعت است. الکتروموتور القایی چند فاز قفس سنجابی نیاز به کموماتور،جاروبک،یا حلقه های لغزان ندارد. آنها در مقایسه با الکتروموتورهای تک فاز یا الکتروموتورهای سنکرون دارای کمترین حجم سیم پیچی،حداقل عایق،وکمترین قیمت به ازای هر اسب بخار هستند.
بنابراین،به عنوان پر مصرف ترین الکتروموتور صنعتی شناخته می شوند.اجزای اصلی یک الکتروموتور القایی استاتور وروتور هستند.
استاتور بخش ساکن اولیه وروتور بخش گردان ثانویه است. توان از استاتور به روتور از طریق عملکرد ترانسفورماتوری القاء می گردد.
جهت مشاهده انواع الکتروموتور دالاندر اینجا کلیک کنید
الکتروموتور چند فاز
الکتروموتور القایی چند فاز به شبکه سه فاز متصل می شود. جریان ها در شبکه سه فاز ۱۲۰ درجه الکتریکی با یکدیگر تفاوت دارند. استاتور یک الکتروموتور القایی سه فاز دوقطب به صورت شماتیک می باشد.
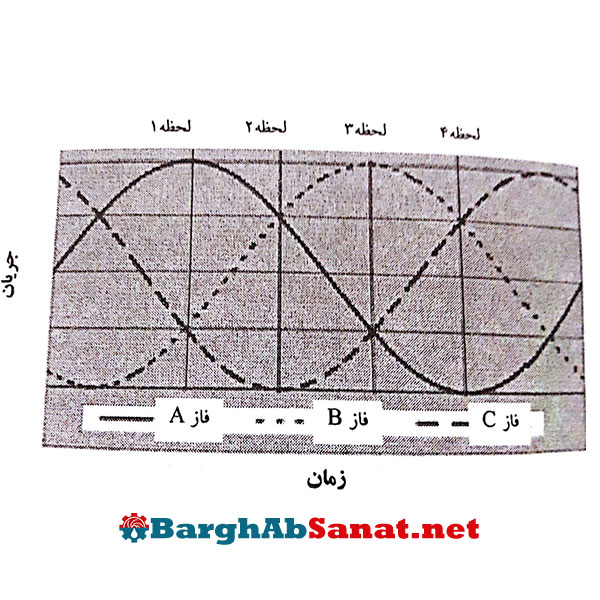
زوج قطب ها برای هر فاز در شکل مشخص شده اند.جهت ودامنه شارهای سه فاز (QA,QB,QC) به صورت بردار نشان داده شده اند. بردلرها چهار لحظه زمانی را در شکل مشخص می نمایند. بردار شار برآیند به صورتQ2 نمایش داده شده است. جهت چرخش بردار شار برآیند ساعت گرد می باشد.شکل زیر چهار لحظه زمانی راتحت عنوان لحظه ۱ تا لحظه ۴ مشخص نموده است.
لحظه۱:
جریان فاز A در حداکثر مقدار خود بوده وجریان فازهای C و B در نصف مقدار حداکثر منفی خود می باشند. بردار شارها برای هر فاز در شکل ۲_۲ معلوم شده اند.با استفاده از جمع برداری،شار برآیند (Q۲) برابر ۲/۳ شار حداکثر هر فاز بوده در موقعیت ساعت ۱۲ یا مکان صفر درجه قرار دارد.
لحظه ۲:
جریان فاز C اکنون در حداکثر منفی خود وجریان فازهای C و B در نصف حداکثر مثبت خود هستند. بردار شار برآیند برآیند برابر ۲/۳ حداکثر بوده و در موقعیت ساعت ۲ یا ۶۰ درجه قرار دارد. بردار برآیند به میزان ۶۰ درجه ساعت گرد نسبت به زمان ۱ چرخیده است. بنابراین برای هر ۶۰ درجه تغییر در زمان،بردار برآیند ۶۰ درجه گردش کرده است.
لحظه ۳:
جریان فازB اکنون در حداکثر مقدار مثبت خود بوده وجریان فازهای A و C در نصف مقدار حداکثر منفی خود هستند. بردار شار برابر ۲/۳ حداکثر بوده و در موقعیت ساعت ۴ یا ۱۲۰ درجه واقع است.
لحظه ۴:
جریان فازA اکنون در حداکثر مقدار منفی خود بوده وجریان فازهای C و B در نصف مقدار حداکثر مثبت خود هستند. بردار شار برآیند مجددا ۲/۳ حداکثر بوده ودر موقعیت ساعت ۶ یا مکان ۱۸۰ درجه قرار می گیرد.
مشاهده می شود بردار شار برآیند ۱۸۰ درجه ساعت گرد از لحظه ۱ تا لحظه ۴ یا نصف سیکل چرخیده است. این نصف سیکل سبب شده بردار شار برآیند،که نمایانگر روتور بوده به میزان یک قطب گردش نماید. به این ترتیب روتور در کل سیکل یا ۳۶۰درجه ،دوقطب می چرخد. بنابراین برای یک الکتروموتور دوقطب، یک سیگل باعث یک دور می شود.اگر الکتروموتور چهار قطب باشد،بردار شار برآیند دوقطب در هر سیکل گردش می کند. به عبارت دیگر،گردش دو قطب در یک الکتروموتور چهار قطب برابر ۱۸۰ درجه خواهد بود.الکتروموتور چهار قطب نیاز به ۲ سیکل برای یک دور گردش دارد. بنابراین،رابطه بین سرعت الکتروموتور وتعداد قطب های آن عبارت است از:
[psfw slug=”14602″]
 ۲*f/p= دور در دقیقه
۲*f/p= دور در دقیقه
بنابراین،سرعت یا دور در دقیقه(r/min)یک الکتروموتور القایی نسبت عکس با تعداد قطب ها دارد. محاسبه سرعت الکتروموتور از رابطه زیر صورت می گیرد(۱ دقیقه=۶۰ ثانیه).

n=120*f/p
ولتاژ تغذیه سه فاز
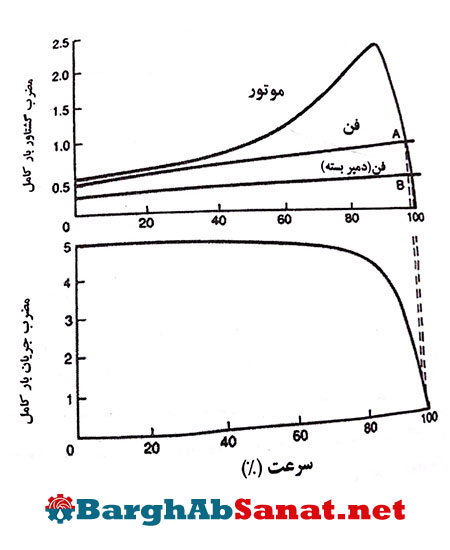
ولتاژ تغذیه سه فاز،جریان سیم پیچ استاتور را ایجاد می کند که باعث تولید میدان مغناطیسی گردان می شود. شار این میدان مغناطیسی، هادی های اتصال کوتاه شده روتور را قطع نموده و جریانی را القاء می نماید. اثر متقابل جریان وشار مغناطیسی ایجاد یک گشتاور می کند که باعث چرخش می شود. شکل زیر، منحنی سرعت_گشتاور رابرای یک الکتروموتور نمونه نشان می دهد و منحنی اضافه شده بر آن منحنی سرعت_گشتاور یک هواکش است که توسط این الکتروموتور به حرکت در می آید. قسمت پایین شکل مربوط به سرعت_جریان الکتروموتور است. همان گونه که مشاهده می شود جریان تا حدود ۹۰% سرعت الکتروموتور در سطح جریان راه اندازی باقی می ماند.
گشتاور الکتروموتور القایی
گشتاور تا هنگامی که به حداکثر خود برسد افزایش می یابد که در مورد فوق این گشتاور در سرعت ۹۵% حاصل می شود، این نقطه گشتاور حداکثر نامیده می شود. افزایش بعدی باعث می گردد که گشتاور کاهش یابد تا اینکه به صفر برسد،و این پر صورتی است که سرعت بتواند به ۱۰۰% برسد. در سرعت صفر،گشتاور بیش از نیاز هواکش است و بنابراین الکتروموتور شتاب می گیرد. سرعت به طور یکنواخت افزایش می یابد و تا سرعت ۳۰%،گشتاور اضافی الکتروموتور نسبت به هواکش تقریبا ثابت می ماند.
گشتاور هنگام راه اندازی
پس از سرعت ۴۰%،گشتاور اضافی بزرگی به وجود می آید و بنابراین ماشین به سرعت شتاب می گیرد تا بتواند مقدار گشتاور مورد نیاز هواکش را در نقطه A فراهم کند. اگر دمپر (دریچه) های هواکش بسته باشند،در این صورت گشتاور مورد نیاز بسیار کمتر است.گشتاور اضافی وهمچنین شتاب اضافی بیشتر بوده وماشین ،سرعت خود را افزایش می دهد تا مقدار گشتاور مورد نیاز هواکش را در نقطه B تحویل دهد. اگر خطوط عمودی از نقاط A و B رسم شوند تا منحنی سرعت را قطع کنند،جریان بار بر روی منحنی جریان سرعت تعیین می گردد.
ازمنحنی گشتاور_سرعت مشخص می شود که بیشترین خطر قفل شدن الکتروموتور تا سرعت ۳۰% استاتور وجود دارد زیرا که اختلاف بین گشتاور الکتروموتور و بار کمترین می باشد. اگر کاهش در گشتاور الکتروموتور تا سطحی ایجاد شود که برابر گشتاور هواکش در آن سرعت شود،در آن صورت الکتروموتور شتاب نگرفته وجریان راه اندازی را می کشد.کاهش در گشتاور می تواند در اثر کاهش ولتاژ صورت پذیرد.
گشتاور حداکثری
اختلاف سرعت روتور ومیدان گردان را لغزش می نامند. بنابراین راکتانس روتور متناسب با فرکانس لغزش است. سرعتی که در آن گشتاور حداکثر اتفاق می افتد.
بستگی به نسبت مقاومت روتور به راکتانس روتور دارد. راکتانس روتور متناسب با فرکانس روتور بوده،که آن نیز وابسته به اختلاف بین سرعت روتور وسرعت میدان گردان تولید شده در استاتور است.
گشتاور حداکثر زمانی اتفاق می افتد که راکتانس روتور برابر مقاومت روتور است_یعنی هنگامی که R2=SX2 ,در این رابطه S لغزش می باشد.در مورد فوق نسبت X/R برابر ۲۰/1 است،بنابراین گشتاور حداکثر در لغزش S=1/20=0/05,یعنی در سرعت 95% اتفاق می افتد.
الکتروموتور با حلقه لغزان
در الکتروموتور های با حلقه لغزان این امکان وجود دارد که با اتصال یک بانک مقاومتی در روتور، مقاومت ایجاد کرد. این عمل محل گشتاور را تغییر خواهد داد. به عنوان مثال اگر مقاومت به طوری اضافه شود که مقاومت کل مساوی با راکتانس در ۵۰ هرتز باشد،در آن صورت گشتاور حداکثر در S=R/X=1 یعنی هنگامی که الکتروموتور متوقف است، اتفاق خواهد افتاد. این امر باعث خواهد شد که گشتاور نسبتا بالایی به وجود آید وبه سرعت باعث شتاب روتور شود ولی با بار نشان داده شده،سرعت فقط ۸۲% خواهد بود.
اگر هنگامی که الکتروموتور به سرعت ۳۰% می رسد، میزان مقاومت خارجی به کمتر از نصف کاهش یابد، گشتاور حداکثر در S=0.5,یعنی نصف سرعت سنکرون، اتفاق خواهد افتاد و سرانجام مقاومت خارجی به صفر کاهش میی یابد و شرایط همان خواهد بود که در شکل زیر نشان داده شده است. منحنی گشتاور_سرعت برای سه پله مقاومت در شکل زیر نشان داده شده است.
[psfw slug=”%d9%85%d8%ad%d8%b5%d9%88%d9%84%d8%a7%d8%aa-%d8%a7%d9%84%da%a9%d8%aa%d8%b1%d9%88%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d9%88-%da%af%db%8c%d8%b1%d8%a8%da%a9%d8%b3″]
روش فوق،روشی قابل قبول برای راه اندازی الکتروموتورهای با حلقه لغزان می باشد، اما تغییر در مقاومت خارجی باید به آرامی انجام شود تا اینکه بهترین شتاب به دست آید. الکتروموتور های با حلقه لغزان بسیار گران تر از الکتروموتور های قفس سنجابی هستند.بنابراین فقط هنگامی استفاده می شوند که لازم باشد،به عنوان مثال در جایی که بارهای با سختی بالا و یا بارهای ضربه ای وجود دارند.
با توجه به این موضوع که دانش و تجربه مهم ترین عامل در بهره برداری می باشد با استفاده از مقاله های منتشر شده تخصصی گروه صنعتی برقاب صنعت می توانید دانش و اطلاعات خود را در مورد بهره برداری و نگهداری انواع الکتروموتور، الکتروگیربکس، پمپ آب، موتور برق و دیزل ژنراتور، … افزایش دهید.
برقاب صنعت
گروه صنعتی برقاب صنعت با ربع قرن تجربه در زمینه فروش و خدمات رسانی انواع موتورآلات و تجهیزات صنعتی کشاورزی مفتخر است. در جهت آسان سازی کسب اطلاعات فنی مهندسی و خرید محصولات برای شما هموطن گرامی فروشگاه آنلاین برقاب صنعت وابسته به گروه صنعتی برقاب صنعت را در اختیار شما هموطن گرامی قرار دهد. تا در هر جای ایران پهناور که در حال کار و زندگی می باشید. به راحتی از خدمات تخصصی فنی و مهندسی و خرید مطمئن بهره مند شوید.
مهندسین ما در واحد فنی منتظر شما هستند. تا در طراحی ، خرید، و انجام انواع پروژه های کشاروزی، صنعتی و ساختمانی ( گلخانه صنعتی، پرورش ماهی، انواع صنایع سبک و سنگین، صنایع شیمیایی، راهسازی، دامداری و دامپروری) دانش کافی و کاربردی را در اختیار شما قرار دهند.
لازم به ذکر است که قیمت ها در فروشگاه آنلاین برقاب صنعت، نازلترین قیمت در بازار است. و مشاورین فنی و تخصصی گروه برقاب صنعت در زمینه های مختلف فعالیت این گروه، اعم از آبرسانی ساختمانی و خانگی توسط پمپ آب های خانگی. ساخت دستگاه های تخصصی توسط الکتروموتور ها و گیربکس ها در صنایع کوچک و بزرگ. کشاورزی و تجهیزات آن در مزارع، باغها، و یا گلخانه ها یا پرورش دام، طیور و آبزیان. راهسازی و ساختمان سازی توسط ابزار و تجهیزات تخصصی، از مجرب ترین و خبره ترین مشاوران تخصصی در آن زمینه هستند. لذا به شما صنعتگر، کشاورز و یا هموطن گرامی این اطمینان را می دهیم که جلب رضایت مراجعین هدف اصلی این گروه صنعتی (برقاب صنعت) می باشد.
از اینکه گروه صنعتی برقاب صنعت را برای خرید و کسب اطلاعات فنی و مهندسی انتخاب و اعتماد کرده اید متشکریم.
تهران، خیابان سعدی جنوبی، پاساژ سعدی قدیم واحد ۴٫۶
تلفن تماس: ۳۶۶۱۳۷۷۴
