
گروه صنعتی برقاب صنعت
دلایل خرابی میله های روتور
دلایل مختلفی برای خرابی میله های روتور وجود دارند، ولی مهمترین آن ها را می توان به سه دسته تقسیم کرد:
تنش حرارتی
تنش مغناطیسی
خستگی مکانیکی.
[psfw slug=”%d9%85%d8%ad%d8%b5%d9%88%d9%84%d8%a7%d8%aa-%d8%a7%d9%84%da%a9%d8%aa%d8%b1%d9%88%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d9%88-%da%af%db%8c%d8%b1%d8%a8%da%a9%d8%b3″]
هر دو نوع میله های روتور آلومینیوم ریخته گری و مسی می توانند در معرض این نوع تنش ها قرار گیرند. با این وجود، ساختمان و طراحی هر دوی آن ها تاثیر عمده ای بر میزان تنش حرارتی و مکانیکی که می توانند قبل از خرابی تحمل کنند،دارند.
خرابی روتورها در اغلب موارد ناگهانی بروز می نمایند،ولی چند استثناء وجود دارد که آن ها معمولا در یک دوره طولانی رخ می دهند. تشخیص زود هنگام خرابی میله های روتور دشوار است. دلیل عمده برای خرابی اکثر روتورها، بهره برداری از الکتروموتور فراتر از حدود طراحی آن می باشد.
جهت مشاهده انواع الکتروموتور با قدرت 25 اسب اینجا کلیک کنید
جهت مشاهده انواع الکتروموتور با قدرت 15 اسب اینجا کلیک کنید
الف) خرابی های ناشی از تنش حرارتی
وقتی که الکتروموتور به فراتر از توانایی طراحی شده خود رانده می شود، رخ می دهند. خرابی های ناشی از تنش حرارتی می تواند به سرعت و یا در طول زمان رخ دهند. مهم ترین دلایل تنش حرارتی تعداد بسیار زیاد راه اندازی های متوالی، شتاب گیری های طولانی مدت روتور، توقف اجباری روتور، اضافه بارهای شدید و سایش روتور به استاتور هستند.
شاید معمول ترین دلیل خرابی ناشی از تنش حرارتی بر اثر راه اندازی های متوالی بسیار زیاد باشد. جریان الکتروموتور القائی در هنگام راه اندازی معمولا ۵ تا ۷ برابر جریان بار کامل، تلفات حرارتی I 2 R در روتور تولید می کند. چون حرارت سریعتر از آن که بتواند به ورق های هسته، میله های روتور و حلقه های انتهایی منتقل شود، تولید می گردد، لذا درجه حرارت روتور بسیار سریع افزایش می یابد. افزایش درجه حرارت میله های روتور و حلقه های انتهایی ممکن است بیشتر از ℃۲۰ در هر ثانیه در موقع راه اندازی زیاد شود.
حلقه های انتهایی به صورت مخزن حرارت برای میله های روتور در آمده و در نتیجه انبساط شعاعی در آن ها ایجاد می شود که سبب تنش های حرارتی و بارهای دینامیکی شدید در قفس روتور می گردد.
تنش شدید در نقطه خروج میله ها
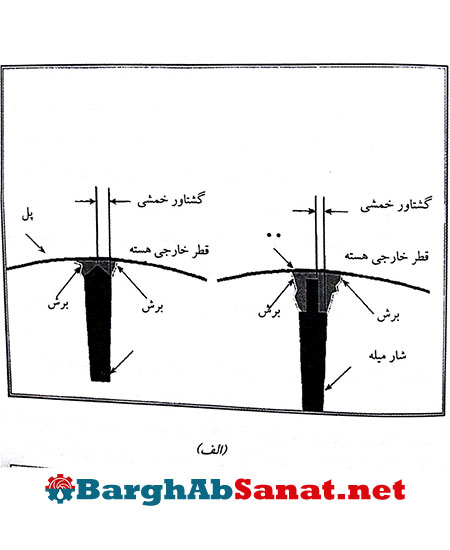
گرچه افزایش درجه حرارت در حلقه های انتهایی سریع بوده ولی این افزایش در ورق های هسته کند می باشد. به دلیل ضریب انبساط بزرگتر مس از فولاد و نیز تفاوت زیاد درجه حرارت بین ورق های هسته روتور و حلقه های روتور یک نیروی خمشی شعاعی تولید می شود که بر میله های روتور اعمال می گردد.
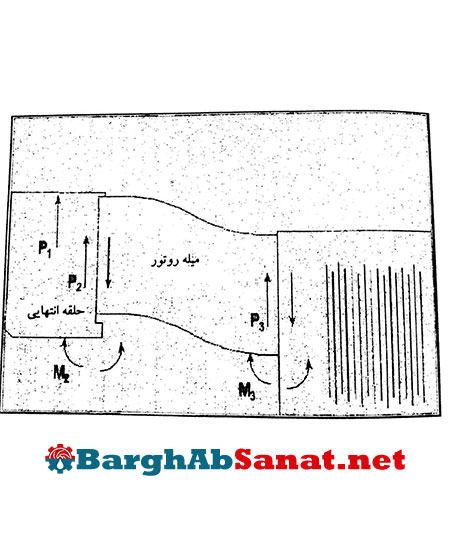
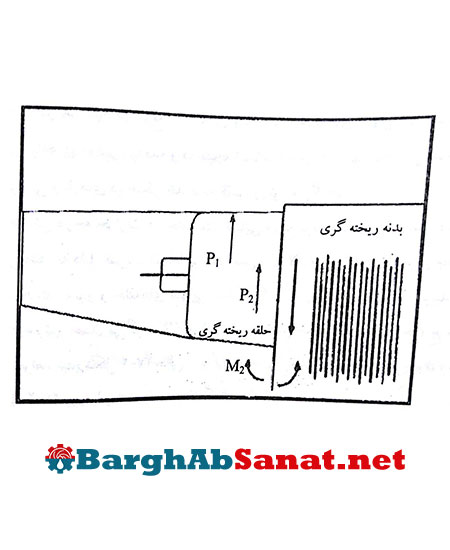
این موضوع سبب تنش شدیدی در نقطه خروج میله ها از هسته روتور خواهد شد، شکل بالا مثالی از نیروی اعمال شده بر یک میله مسی روتور را نشان می دهد. شکل بالا مثالی از نیروی اعمال شده بر یک میله مسی روتور را نشان می دهد. شکل زیر نیرو را روی روتور ریخته گری نشان می دهد.
میله ها معمولا از ۱ تا ۳ اینچ فراتر از لایه های ورق هسته روتور در روتورهای میله دار گسترش می یابند. این انبساط میله اجازه مقدار معینی از رشد شعاعی را می دهد. با این وجود، وقتی که رشد شعاعی از حد طراحی شده در یک مبنای معمولی مثلا در حالت تعداد زیاد ره اندازی های متوالی می رود، در ماه میله روتور خستگی ایجاد شده و ترک بر میدارد، که در طول زمان منجر به خرابی روتور خواهد شد.
روتور ریخته گری آلومینیوم
روتورهای ریخته گیری آلومینیومی، دارای انبساط میله نیستند. روتورهای ریخته گری آلومینیومی مزایای دیگری نسبت به روتورهای میله دار دارند. روتور ریخته گری آلومینیومی یک مجموعه یکپارچه بوده که قفس آلومینیومی به طور مستقیم در هسته، ریخته گری شده و اجازه می دهد که مواد تماس موثری بالایه های هسته داشته باشند. تماس موثر، انتقال حرارت از آلومینیوم به لایه های هسته روتور را بهبود داده و مقدار حرارت منتقل شده به حلقه های انتهایی را کاهش می دهد.
فن های روتور به طور یکپارچه در داخل حلقه های انتهایی ایجاد ریخته گری شده و به این ترتیب مخازن حرارتی بسیار عالی برای حلقه های انتهایی ایجاد می کنند. درجه حرارت کمتر حلقه های انتهایی، انبساط شعاعی حلقه های انتهای آن همانند روتور میله ای خستگی ایجاد نموده و سبب ترک خوردگی میله روتور و خرابی آن می شود.
[psfw slug=”%d9%85%d8%ad%d8%b5%d9%88%d9%84%d8%a7%d8%aa-%d8%a7%d9%84%da%a9%d8%aa%d8%b1%d9%88%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d9%88-%da%af%db%8c%d8%b1%d8%a8%da%a9%d8%b3″]
استاندارد NEMA MG_1 بخش های ۱۲.۵۴.۱ و ۲۰.۴۳.۱ تاکید می دارند که الکتروموتور باید توانایی های زیر را داشته باشد:
- دو تا راه اندازی پی در پی، به حالت سکون رسیدن الکتروموتور در بین راه اندازی ها، با قرار داشتن الکتروموتور در درجه حرارت محیط
- یک راه اندازی با قرار داشتن ال در ابتدا در درجه خرارت بار نانی فراتر نباشد.
اکر تعداد راه اندازی های متوالی بیشتری مورد نیاز باشد، باید با سازنده الکتروموتور در زمان خرید مذاکره نمود تا اطمینان حاصل شود خرابی های زودرس روتور اتفاق نمی افتد.
تاثیر اضافه بار
اضافه بارهای شدید ماندگار بر روتور شبیه به تعداد زیاد راه اندازی عای متوالی تاثیر می گذارد.ذاضافه بارهای شدید باعث سیکل های خرارتیدر میله روتور و اتصالات حلقه های انتهایی می باشد. اگر اضافه بارها در طراحی الکتروموتور منظور نشده باشند، سیکل های حرارتی ممکن است باعث تنش های شعاعی شدید در میله روتور و اتصالات حلقه های انتهایی شده و در نهایت منجر به ترک میله روتور و خرابی روتور گردند. از اضافه بارهای شدید ماندگار باید اجتناب ورزید یا آنکه در زمان خرید الکتروموتور اعلام نمود.
توقف اجباری الکتروموتور
توقف اجباری الکتروموتور نیز ممکن است باعث خرابی میله های روتور شود. توقف اجباری روتور در موقعی که نیاز گشتاور راه اندازی بار از گشتاور تولیدی الکتروموتور زیادتر باشد رخ می دهد. دو فاز شدن الکتروموتور، ولتاژ کم یا انتخاب نامناسب ظرفیت الکتروموتور دلایل دیگری برای توقف اجباری هستند.
الکتروموتور در این حالت یا راه نمی افتد یا آنکه در سرعتی کمتر از گشتاور خداکثر کتر خواهد کرد. در هر دو صورت، جریان الکتروموتور معمولا ۵ تا ۷ برابر جریان نامی است. اگر الکتروموتور از شبکه جدا نشده و اجازه داده شود که تحت این شرایط برای مدت زمان کوتاهی کار کند،گرمایش شدید روتور و استاتور رخ خواهد داد. درجه حرارت روتور در اغلب موارد به میزان ℃۲۰ در هر ثانیه یا بیشتر افزایش می یابد. خرابی روتور آنگاه می تواند با رسیدن درجه حرارت میله روتور به نقطه ذوب مواد آلومینیومی یا برنزی اتفاق بیفتد.
روتورهایی که به استاتور سائیده می شوند نیز ممکن است باعث خرابی الکتروموتور ها گردند.
ساییدگی های روتور می تواند در هنگام خرابی یاتاقان ها، طراز نادرست فاصله هوایی و کشش مغناطیسی نامتعادل رخ دهد. گرمایش ناشی از اصطکاک روتور و استاتور می تواند منجر به خرابی میله های روتور شود.
[psfw slug=”14602″]
ب)تنش های مغناطیسی
تنش های مغناطیسی می توانند به دو دسته عمده تقسیم شوند؛
کشش نا متعادل مغناطیسی
تنش الکترو مغناطیسی
تنش های مغناطیسی معمولا بر اثر وجود نقصی در الکتروموتور هستند. گرچه شرایط خاص هر مورد کی تواند نقص را شتاب دهد، ولی معمولا دلیل آن به طراحی یا ساخت بر می گردد.
تمامی الکتروموتور ها دارای مقداری کشش مغناطیسی نا متقارن هستند. در ساخت یک الکتروموتور مقداری تولرانس ابعاد مجاز است. بنابراین، فاصله هوایی الکتروموتور معمولا یکنواخت نیست. فاصله هوایی نایکنواخت منجر به کشش مغناطیسی بزرگتر به سمت بخش کوچکتر فاصله هوایی می شود.
اگر ناهمگونی فاصله هوایی الکتروموتور خیلی بزرگ بوده یا محور الکتروموتور انعطاف خیلی زیاد داشته باشد، آنگاه حرکت به یک سمت در روتور ممکن است رخ دهد. حرکت به یک سمت روتور باعث برخورد یا سایش روتور به استاتور می شود. اصطکاک برخورد در نهایت منجر به نقص روتور به دلیل درجه حرارت زیاد یا نیروی ناشی از برخورد می گردد.
سازندگان الکتروموتور در حالت معمول الکتروموتور ها را با ناهمگونی کم فاصله هوایی و مقاومت (سختی) محور با حاشیه ایمنی کافی برای جلوگیری از حرکت به یک سمت مغناطیسی طراحی می کنند.
نیروهای الکترودینامیکی
تنش های الکترو مغناطیسی وقتی که یک ارتعاش بر اثر نیروهای الکترومغناطیسی رخ می دهد به وقوع می پیوندند. یک نوع از این تنش حرکت میله روتور به صورت شعاعی بین بالا و پایین شیار است. ارتعاش در دو برابر فرکانس جریان روتور رخ می دهد و بر اثر تولید نیروهای الکترودینامیکی میله های روتور توسط شار پیوندی شیار می باشد. انحراف روتور معمولا در هنگام راه اندازی رخ می دهد و باعث خرابی از طریق خستگی میلع های روتور می شود.
خرابی در روتوری که به درستی طراحی شده و فواصل کنترل شده داشته باشد رخ می دهد. ناهمگونی فاصله هوایی باعث ارتعاشات الکترو مغناطیسی یا نویز (سر و صدا) می شود. این ارتعاشات ممکن است منجر به خرابی براثر خستگی شده یا ممکن است به طور ساده سبب افزایش سطح نویز در بار نامی شوند. ارتعاش یا نویز متناظر با افزایش نا همگونی در فاصله هوایی زیاد می شود.
ج) خستگی و تنش مکانیکی
خرابی روتور ممکن است بر اثر خرابی مکانیکی در میله های روتور،حلقه های انتهایی و ورق های هسته نیز رخ دهد. این خرابی ها به طور معمول به نیروهای گریز از مرکز مربوط می شوند. نیروی گریز از مرکز متناسب با حاصلضرب جرم در مجذور سرعت می باشد.
معادل نیروی گریز مرکز F=mr بوده که در آن m=جرم، r=شعاع و w=سرعت زاویه ای بر حسب دور در دقیقه است. الکتروموتور های بزرگ از مواردی هستند که نیروهای گریز از مرکز در آن ها به قدر کافی زیاد می باشند. الکتروموتور های دور متغیر که در سرعتی بالاتر از سرعت ایمن بهره برداری، کار می کنند نیز ممکن است دارای خرابی روتور ناشی از نیروهای گریز از مرکز روی روتور باشند. نیروهای گریز از مرکز شدید،حلقه انتهایی روتور را تحت تنش شعاعی قرار داده و بخش انبساطی خروجی میله روتور را تحت برش توسط یک نیروی خمشی قرار می دهد. شکل های بالا مثال هایی از این تنش را بر روی روتورهای میله ای و ریخته گری نشان می دهند.
[psfw slug=”14599″]
تنش ناشی از نیروی گریز از مرکز
طراحان الکتروموتور قادر هستند تنش های ناشی از نیروهای گریز از مرکز را به وسیله اصلاح طرح روتور کاهش دهند. اصلاح طول زائده میله های روتور تنش های فشاری و کششی در لبه های پایینی و بالایی میله را کاهش می دهند. اصلاح شکل شیار و ارتفاع آن می تواند تنش ها را توزیع مجدد نموده و طول عمر روتور را افزایش دهد. اصلاح شکل حلقه انتهایی اتصال کوتاه کننده یا قرار دادن حلقه های جمع کننده می توانند انبساط شعاعی حلقه انتهایی را به حداقل برساند. تغییر آلیاژ برای دستیابی به حدود تحمل بالاتر نیز امکان دارد.
ورق های هسته روتور در معرض تنش های شدیدالقاء شده توسط نیروهای گریز از مرکز روی قفس روتور هستند. نیروهای گریز از مرکز به طور مستقیم روی میله های روتور عمل کرده و آنها به پل داخل شیار فشار می آورند.
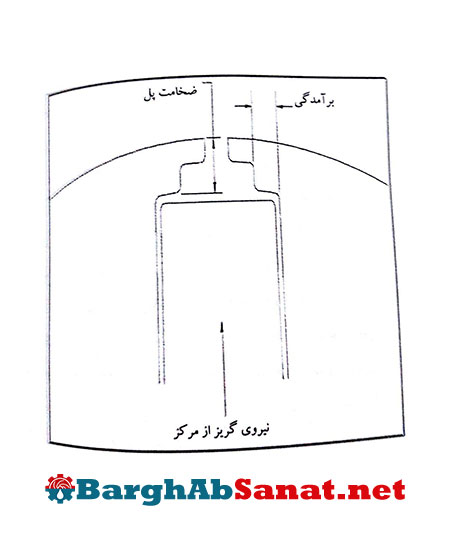
تاثیر نیروی گریز از مرکز بر روی پل ها و شیار های روتور
این نیرو پل را در لبه های خارجی شیار تحت خمش و برش قرار می دهد شکل بالا تنش های شدید هم چنین می تواند سبب شکستن لایه های هسته بین شیارها،خمش پل و غیره شکل الف و ب زیر بیان گر همین موضوع می باشد.
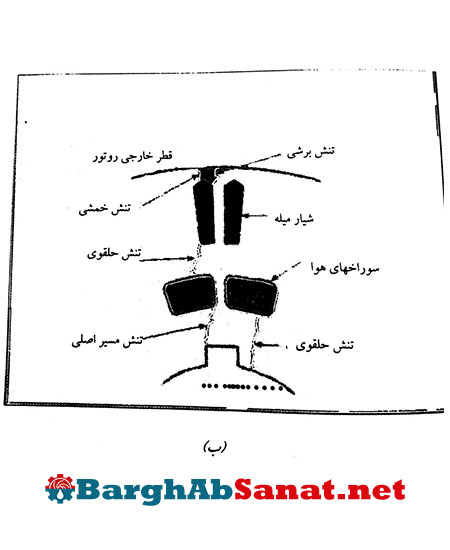
وقتی که تنش های لایه های هسته از حدود مجاز فراتر می رود، مهندسین برق با مهندسین مکانیک برای کم کردن تنش ها کار می کنند. به حداقل رساندن تنش ها ممکن است نیاز به طراحی شیار جدید، تغییر تعداد میله های روتور، اصلاح ضخامت پل و غیره داشته باشد.
خرابی روتور ناشی از نیروی گریز از مرکز معمولا می تواند مربوط به طراحی ضعیف الکتروموتور،مشکلات ساخت یا بهره برداری الکتروموتور در بالاتر از کارکرد ایمن حداکثر آن باشد، ابزار مدل سازی صحیح الکتروموتور به طراح احازه پیش بینی نیرو ها و میزان تنش ها را داده و می توانند الکتروموتور هایی طراحی کنند که خرابی ناشی از نیروی گریز از مرکز نداشته باشند.
با توجه به این موضوع که دانش و تجربه مهم ترین عامل در بهره برداری می باشد با استفاده از مقاله های منتشر شده تخصصی گروه صنعتی برقاب صنعت می توانید دانش و اطلاعات خود را در مورد بهره برداری و نگهداری انواع الکتروموتور، الکتروگیربکس، پمپ آب، موتور برق و دیزل ژنراتور، … افزایش دهید.
برقاب صنعت
گروه صنعتی برقاب صنعت با ربع قرن تجربه در زمینه فروش و خدمات رسانی انواع موتورآلات و تجهیزات صنعتی کشاورزی مفتخر است. در جهت آسان سازی کسب اطلاعات فنی مهندسی و خرید محصولات برای شما هموطن گرامی فروشگاه آنلاین برقاب صنعت وابسته به گروه صنعتی برقاب صنعت را در اختیار شما هموطن گرامی قرار دهد. تا در هر جای ایران پهناور که در حال کار و زندگی می باشید. به راحتی از خدمات تخصصی فنی و مهندسی و خرید مطمئن بهره مند شوید.
مهندسین ما در واحد فنی منتظر شما هستند. تا در طراحی ، خرید، و انجام انواع پروژه های کشاروزی، صنعتی و ساختمانی ( گلخانه صنعتی، پرورش ماهی، انواع صنایع سبک و سنگین، صنایع شیمیایی، راهسازی، دامداری و دامپروری) دانش کافی و کاربردی را در اختیار شما قرار دهند.
لازم به ذکر است که قیمت ها در فروشگاه آنلاین برقاب صنعت، نازلترین قیمت در بازار است. و مشاورین فنی و تخصصی گروه برقاب صنعت در زمینه های مختلف فعالیت این گروه، اعم از آبرسانی ساختمانی و خانگی توسط پمپ آب های خانگی. ساخت دستگاه های تخصصی توسط الکتروموتور ها و گیربکس ها در صنایع کوچک و بزرگ. کشاورزی و تجهیزات آن در مزارع، باغها، و یا گلخانه ها یا پرورش دام، طیور و آبزیان. راهسازی و ساختمان سازی توسط ابزار و تجهیزات تخصصی، از مجرب ترین و خبره ترین مشاوران تخصصی در آن زمینه هستند. لذا به شما صنعتگر، کشاورز و یا هموطن گرامی این اطمینان اگر می دهیم که با یک بار خرید یا مشاوره مشتری دائم برقاب صنعت خواهید شد.
از اینکه گروه صنعتی برقاب صنعت را برای خرید و کسب اطلاعات فنی و مهندسی انتخاب و اعتماد کرده اید متشکریم.
تهران، خیابان سعدی جنوبی، پاساژ سعدی قدیم واحد ۴٫۶
تلفن تماس: ۳۶۶۱۳۷۷۴
